Un nouveau défi relevé par la robotique biomimétique
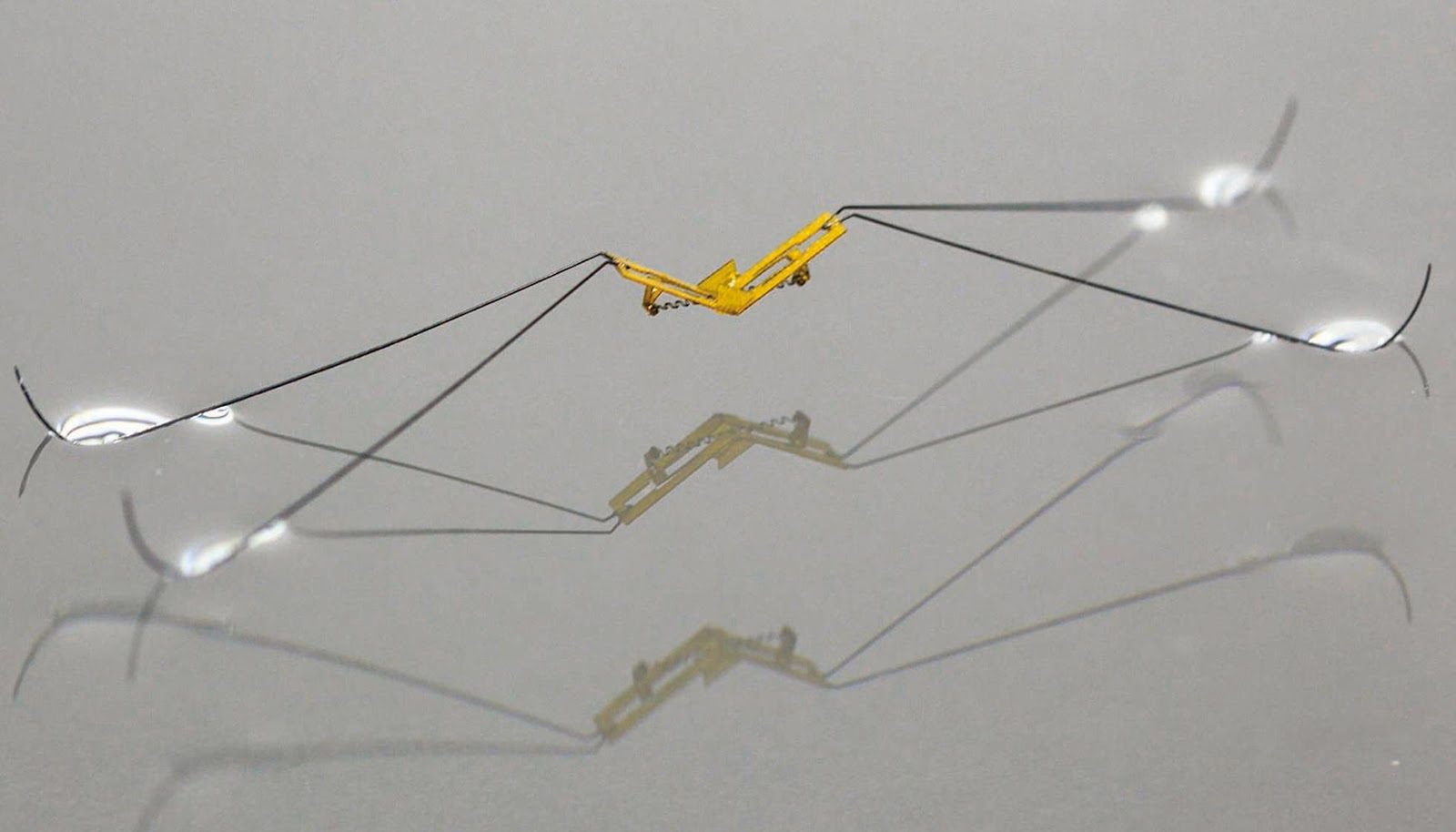
Inspiré des gerris, ces insectes patineurs qui peuplent nos étangs, le Water Strider Robot reproduit leur agilité grâce à des actionneurs piézoélectriques. Une prouesse technologique pour explorer les milieux aquatiques inaccessibles.
Connaissez-vous les gerris ? Ce nom ne vous dit peut-être rien. Mais vous les avez sans doute observés : ces insectes aux grandes pattes disposées en forme de X ont la capacité de se déplacer sur l’eau, faisant penser à des « patineurs » glissant sur les étangs. Des chercheurs du Korea Advanced Institute of Science and Technology (Corée du Sud) et du Wyss Institute de l’université de Harvard (Etats-Unis), ont adopté une approche biomimétique de cet insecte faisant partie des hétéroptères, qu’on appelle aussi araignées d’eau.
Pesant une dizaine de grammes, le Water Strider Robot reproduit leur capacité à marcher, bondir et se déplacer sur l’eau sans briser la tension superficielle. Les gerris utilisent des pattes longues et hydrophobes pour exploiter la tension superficielle, un principe clé repris dans la conception de ce microrobot amphibie.
Pattes en Téflon
Son corps a été fabriqué à partir de fibres de carbone afin de minimiser le poids tout en maintenant l’intégrité structurelle. Ses pattes sont des fils enduits de Téflon. Les chercheurs ont choisi d’utiliser des actionneurs piézoélectriques pour assurer la propulsion du Water Strider Robot.
« Le choix de l’actionneur pour les jambes (…) était la question cruciale. Comme exigences pour un tel robot miniature, les actionneurs de direction doivent être légers, compacts, rapides, avoir une grande déformation, une puissance de sortie suffisante et une faible consommation d’énergie », expliquent Steve H. Suhr, Yun Seong Song, Sang Jun Lee et Metin Sitti.
Les pattes sont actionnées par des cristaux piézoélectriques. Lorsqu’une tension électrique est appliquée aux cristaux, ceux-ci se déforment, provoquant le mouvement des pattes. Selon les chercheurs, les impulsions électriques permettent un contrôle précis des déplacements, y compris des sauts verticaux. Autre exigence : « Les mouvements des trois actionneurs unimorphes piézoélectriques devaient produire des mouvements elliptiques des jambes actionnées. »
Pour cela, parce que les cristaux piézoélectriques convertissent l’énergie électrique en énergie mécanique, ils permettent au robot de générer les mouvements nécessaires pour créer les minitourbillons qui le propulsent sur l’eau.
Des bonds jusqu’à 14 cm de haut
Le déplacement horizontal du robot araignée d’eau est assuré grâce à la synchronisation des mouvements des pattes arrière, reproduisant ceux des gerris. Pour lui permettre de sauter, à des hauteurs pouvant aller jusqu’à 14 cm, soit environ dix fois sa propre taille, les chercheurs ont utilisé un mécanisme élastique couplé aux actionneurs. « La force du saut est contrôlée pour éviter de briser la tension superficielle à l’atterrissage », précisent-ils. L’utilisation du Water Strider Robot est recommandée sur des surfaces d’eau calme, mais il peut ajuster ses mouvements en cas de perturbations mineures, telles que des vagues légères ou le vent.
Mais à quoi pourrait-il bien servir ? Il pourrait être employé pour la surveillance de la qualité de l’eau, la détection de contaminants ou de changements dans les écosystèmes aquatiques. Ou bien l’exploration scientifique dans le cadre d’études de zones aquatiques sensibles, sans perturber les habitats locaux. On parle également de son utilisation pour la recherche en biomimétique. Car il pourrait servir de plateforme pour explorer les limites de l’interaction entre tension superficielle et microrobotique.
à propos de entreprises





les plus lus
à lire aussi


![[Edito] La mécanique de précision face au virage médical](https://www.machinesproduction.fr/wp-content/uploads/2026/06/edito-numero-medical.jpg)