Système d’entraînement à pignon Nexen pour unité robotisée

Nexen Group a fourni un système d’entraînement par pignon à rouleaux à l’intégrateur américain Mesh, pour optimiser les mouvements d’une unité de transfert pour un robot à capacité de charge moyenne. Dédié au soudage de boulons sur une porte en tôle, le système doit réaliser des cordons de soudure d’une haute résistance, tout en évitant l’apparition de marques sur la face opposée de la porte, à maintenir la cadence de production, tout en assurant la précision du positionnement des pièces à souder. Afin de garantir la cadence de production et la précision de positionnement, les concepteurs sur ce type d’installation ont opté pour un robot cartésien plutôt que pour un robot traditionnel à 6 axes. La vitesse que le robot peut atteindre est de l’ordre de 1,25 m/s, la précision de positionnement pouvant être respectée étant d’environ ±0,075 mm.
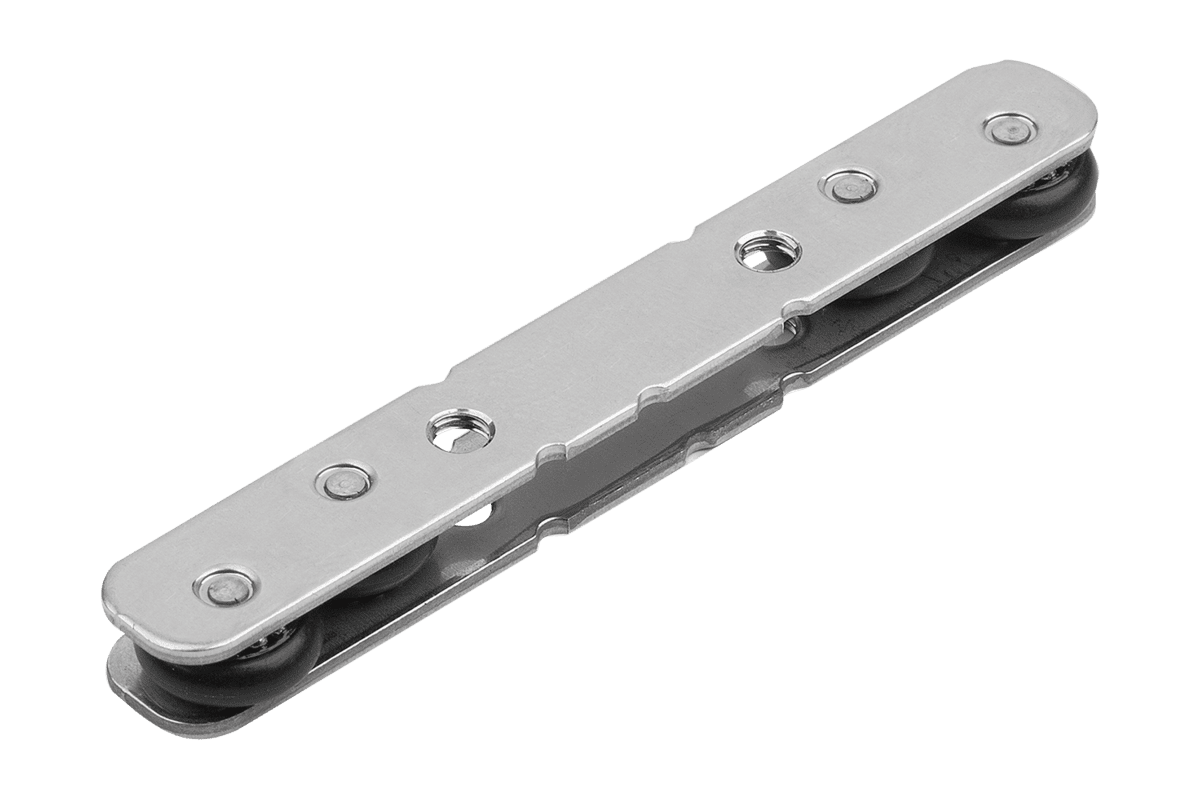
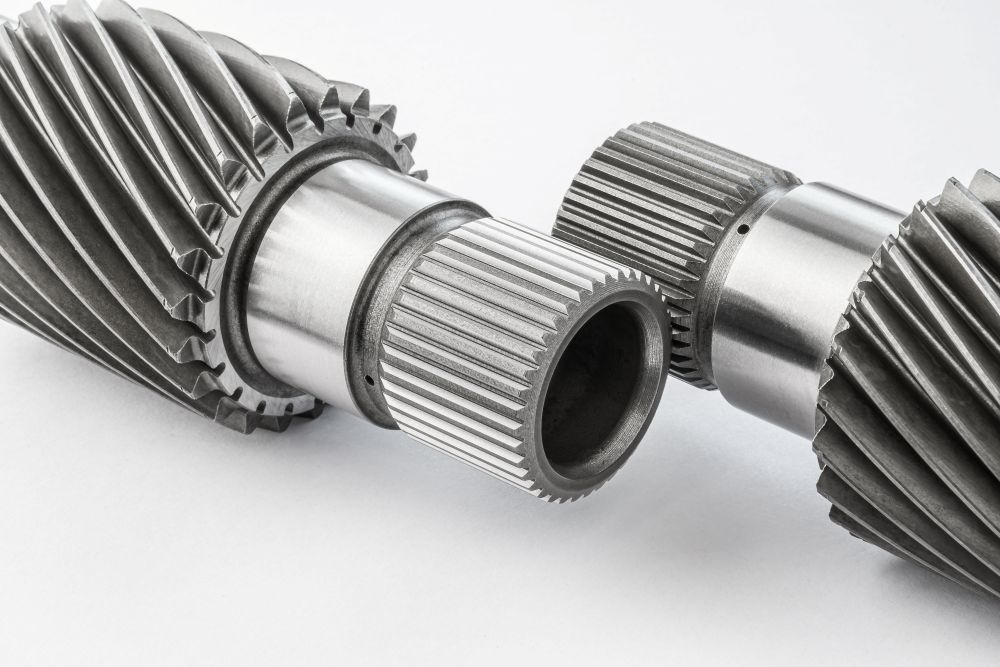
Lors des études du système, la principale question qui se posait était de savoir comment faire évoluer au mieux le robot à l’intérieur de la zone de travail. Pour optimiser les mouvements du robot, l’utilisation du système de pignon crémaillère à rouleaux RPS de la société Nexen associé à des servo-motoréducteurs a été choisie. Contrairement à un système de pignon crémaillère classique, le modèle à rouleaux RPS dispose d’un pignon comportant 10 ou 12 rouleaux sur roulements à aiguilles qui engrènent sur les dents de la crémaillère. Les rouleaux étanchéifiés et lubrifiés se déplacent aisément le long du profil et assurent un fonctionnement sans jeu, ainsi qu’un rendement de 99% lors de la transformation du mouvement rotatif en mouvement linéaire. La vitesse maxi est d’environ 11 m/s, la précision est d’environ ±0,03 mm. Au montage, la denture est légèrement lubrifiée avec une graisse à hautes performances et celle-ci doit être relubrifiée tous les 6 mois ou tous les 2 millions de tours du pignon.
à propos de automatisation




les plus lus


à lire aussi